Publications
FOCI: Trajectory Optimization on Gaussian Splats
Paper Website | PDF | To appear at IROS 2025
Trajectory optimization operating directly on 3D Gaussian Splats. We define a collision metric based on Gaussian overlap integrals and apply this to legged robot planning through tight spaces.
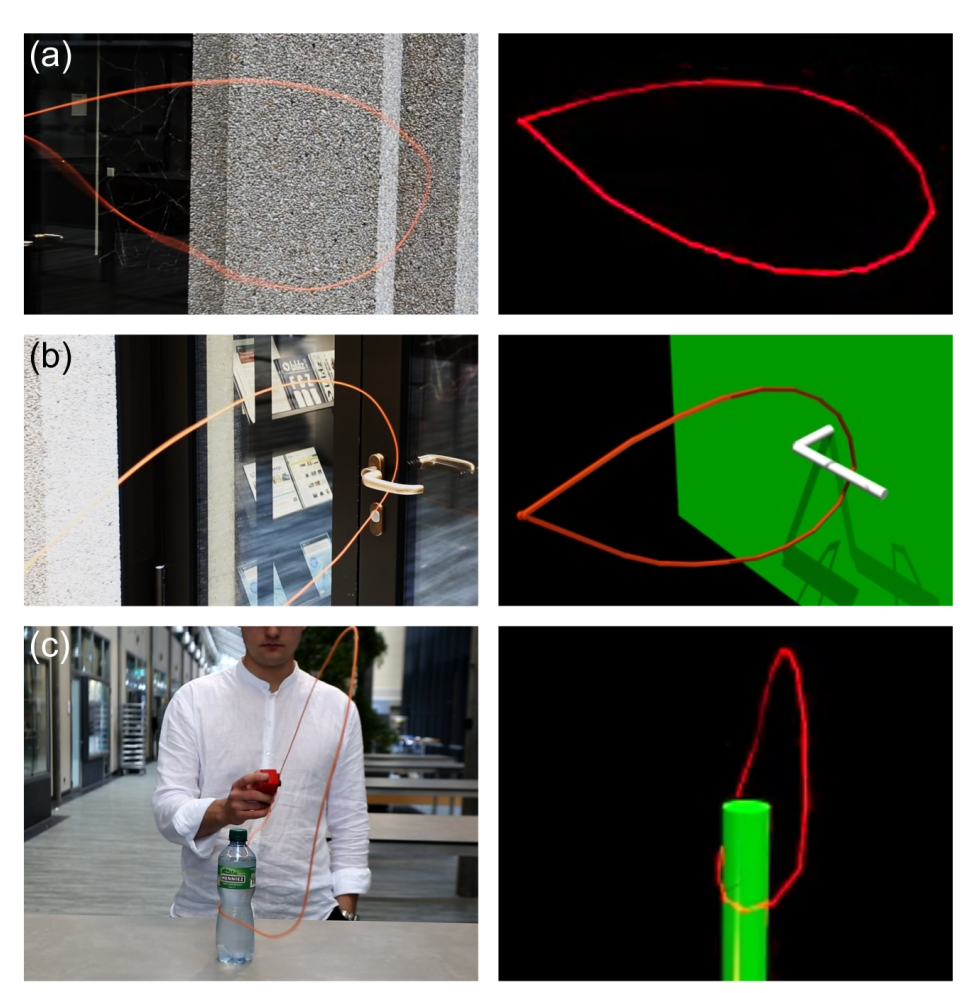
RoboWrangler: Toward Rope-based Grasping for Mobile Manipulation
Github | PDF | Published at RoboSoft 2025
Rope-based robotic manipulator, capable of capturing and retrieving objects using a dynamically controlled loop of rope. We introduce a hardware prototype, develop a physical simulation model, and demonstrate object manipulation on a mobile quadrupedal robot.
Beyond the Cascade: Juggling Vanilla Siteswap Patterns
Project Website | PDF | Published at IROS 2024
Robotic juggling of siteswap patterns with varying throw heights. We introduce a constraint-based trajectory planning framework that enables seamless pattern transitions and juggling of all siteswap sequences involving up to nine-ball throws.
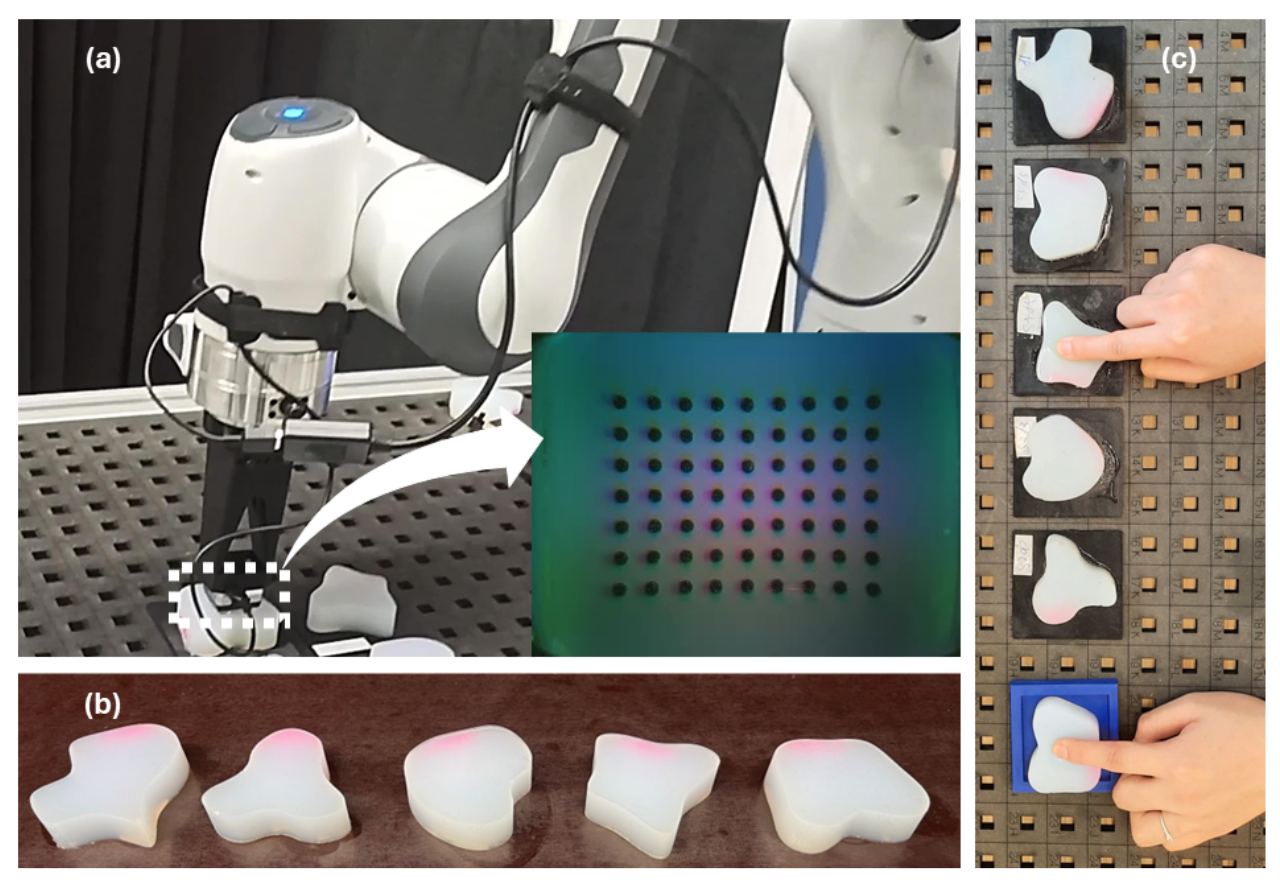
Active Sampling for Hardness Classification with Vision-Based Tactile Sensors
PDF | Published at GRC 2025
Information-theoretic active sampling strategies to improve tactile hardness classification using vision-based tactile sensors.